DOF |
4 |
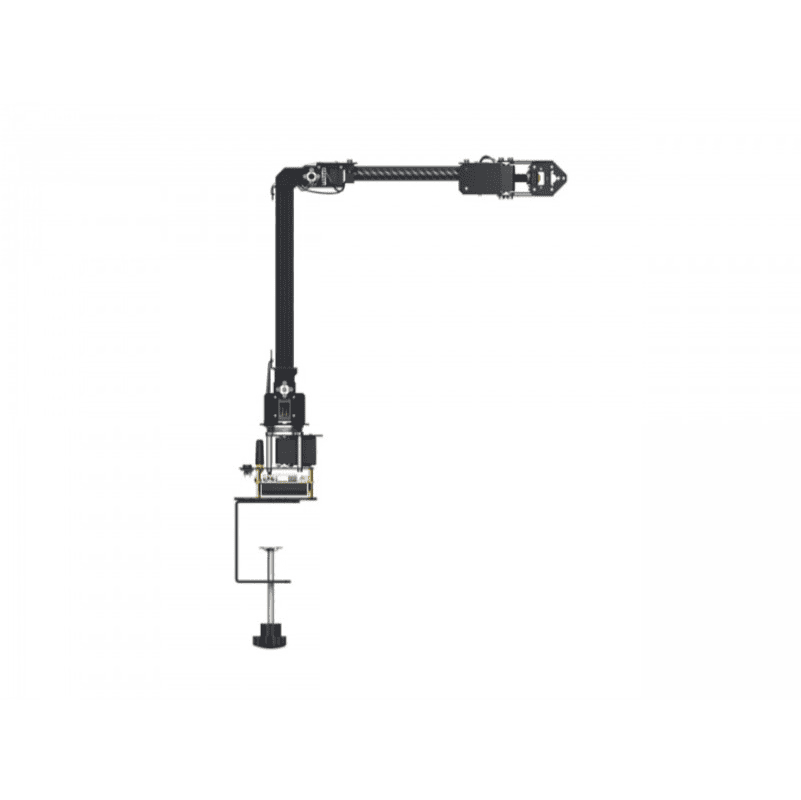
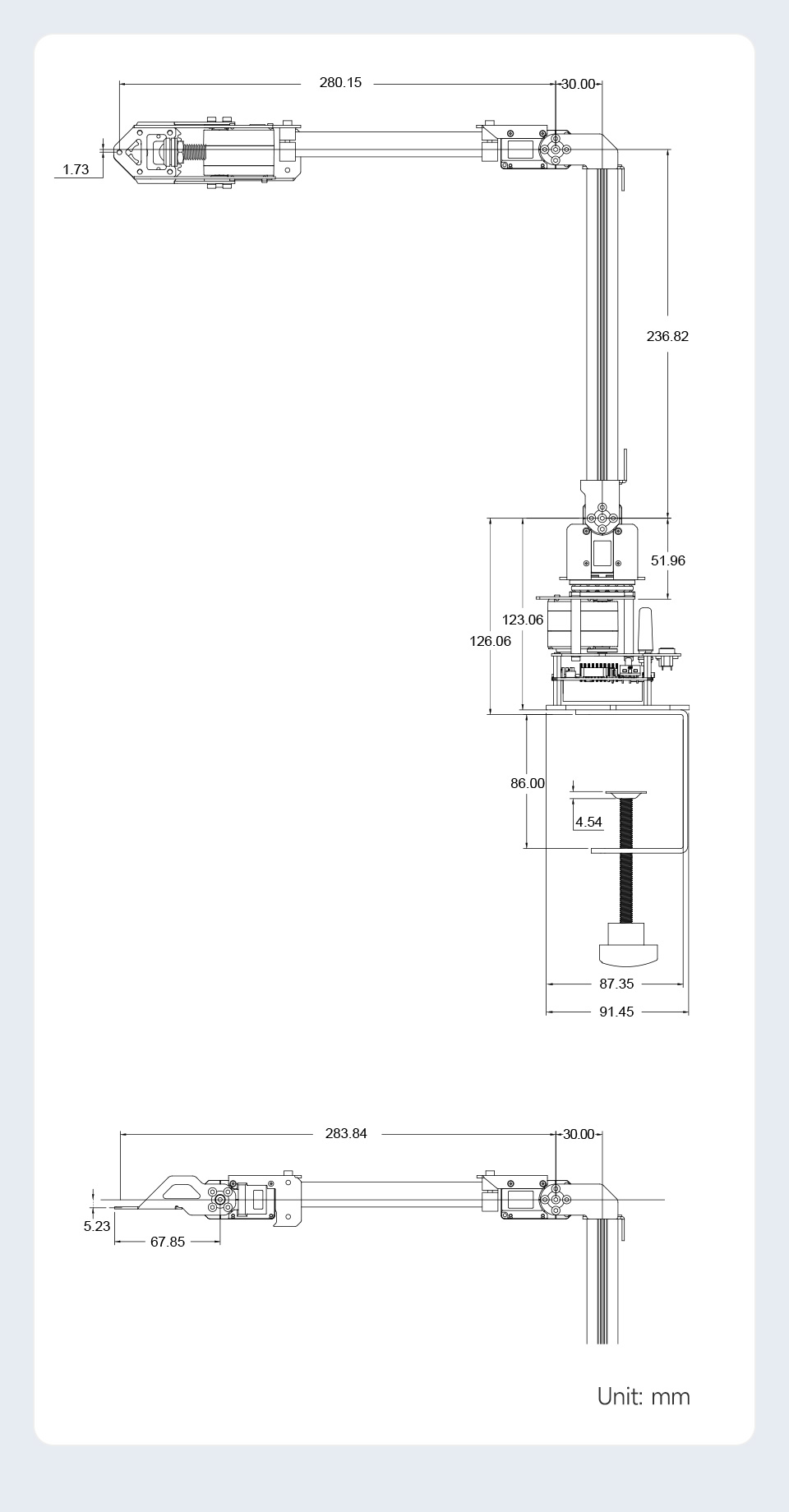
WORK SPACE |
Horizontal diameter: 1090mm (Max, 360° omnidirectional), Vertical: 798mm (Max) |
OPERATING VOLTAGE |
12V 5A power supply, supports 3S Lithium batteries (NOT included) |
LOAD CAPACITY |
0.5kg@0.5m |
REPOSITIONING PRECISION |
≈±4mm (under the same load) |
SERVO ROTATION SPEED |
40rpm (no-load, no torque limit) |
OPERATING RANGE |
BASE-360°, SHOULDER-180°, ELBOW-180°, HAND-135°/270° |
DRIVE TYPE |
TTL Serial bus servo, direct-drive joint |
SERVO NUMBERS |
5 |
JOINT ANGLE SENSOR |
12-bit 360° magnetic encoder |
SERVO TORQUE |
30KG.CM @12V |
JOINT FEEDBACK INFORMATION |
servo status, joint angle, rotation speed, joint load, servo voltage, servo current, servo temperature and servo working mode |
MAIN CONTROL |
ESP32-WROOM-32 |
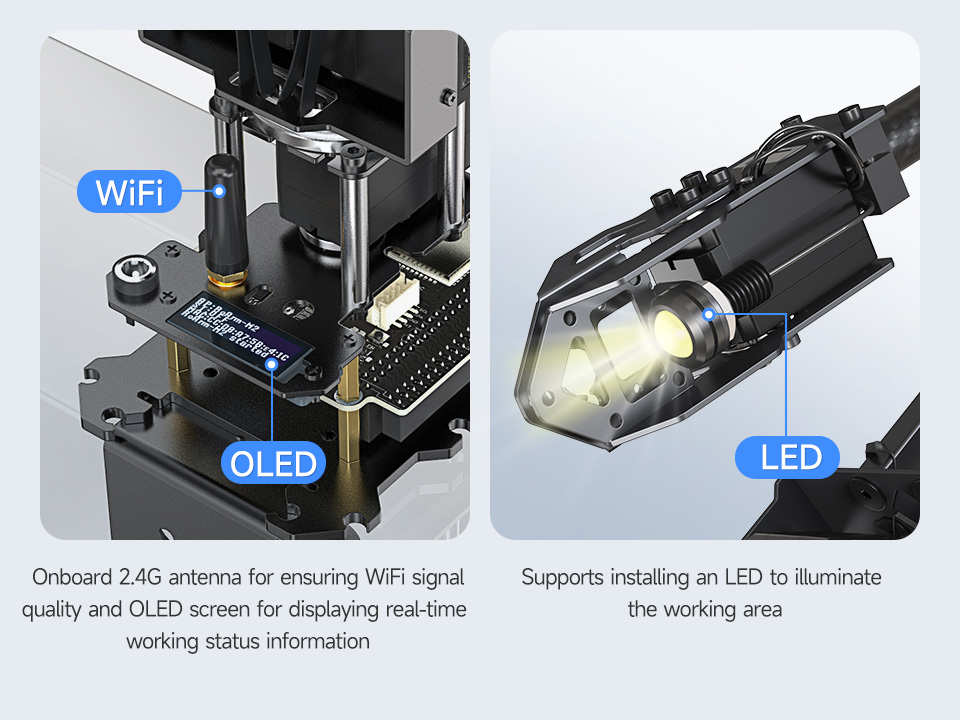
MAIN CONTROL MODULE FEATURES |
WiFi, BT, Dual Core, 240MHz |
WIRELESS CONTROL MODE |
2.4G-WiFi, ESP-NOW |
WIRED CONTROL MODE |
USB, UART |
MANUAL OPERATION MODE |
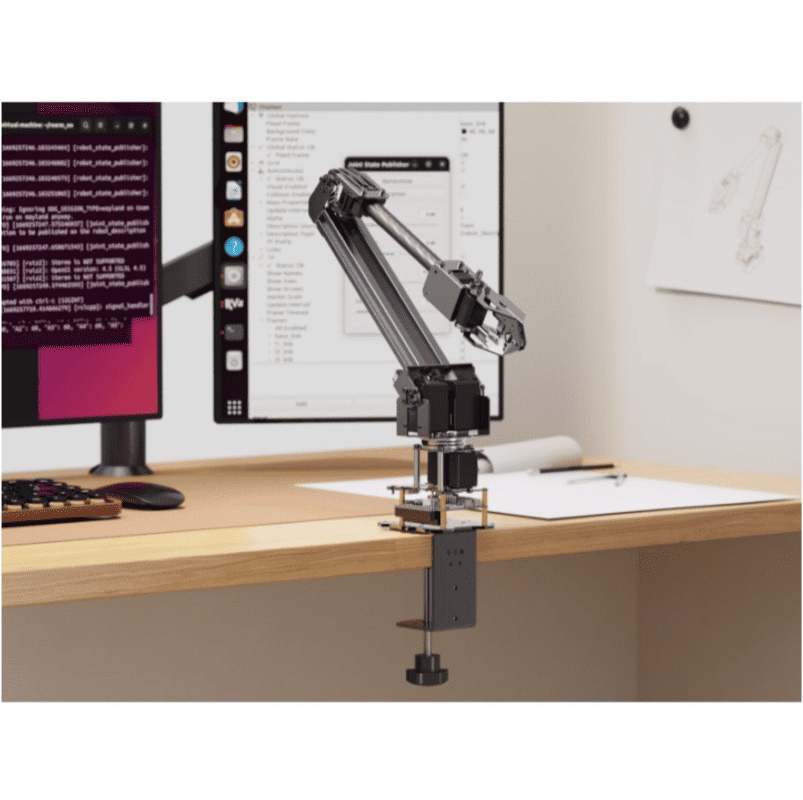
WEB control interface |
HOST OPERATION MODE |
UART/USB/ESP-NOW*/HTTP communication via JSON data format commands (* it does not support obtaining feedback information if using ESP-NOW communication) |
HOST SUPPORT |
USB connection devices including Raspberry Pi, Jetson Orin Nano, and PC. |
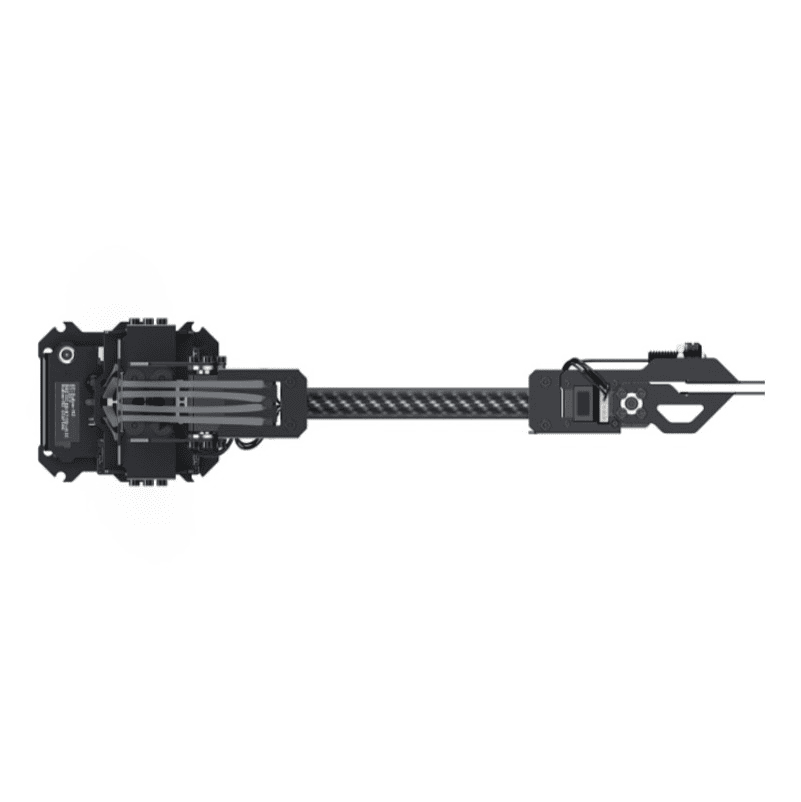
EOAT FUNCTION |
clamp function by default, can be changed as an additional degree of freedom |
LED POWER |
≤1.5W |
OLED SCREEN SIZE |
0.91inch |
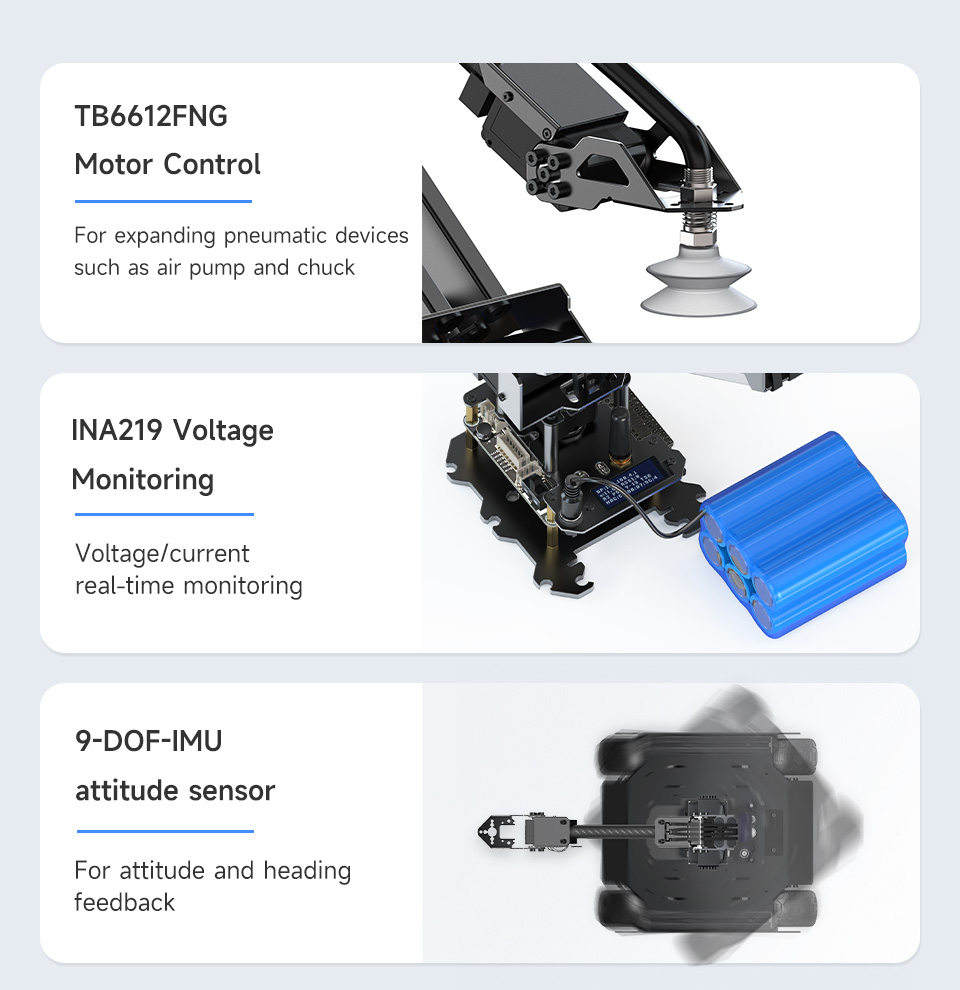
OTHER FUNCTIONS |
2-ch 12V power supply switch, 9-DOF IMU |
ROBOTIC ARM WEIGHT |
826 ±15g (not including the table edge fixing clamp) |
TABLE EDGE FIXING CLAMP WEIGHT |
286 ± 10g |
SUPPORTED TABLE EDGE THICKNESS OF THE CLAMP |
<72mm |
DEMO |
3D Cartesian coordinate system control (inverse kinematics control); Dynamic external force adaptive control; Joint angle control; Operating information feedback; FLASH files system operation; Steps recording and replaying; ESP-NOW control; Leading-Following mode (Hand guiding control); LED control; 12V power supply ON/OFF control; WiFi function settings; Set startup tasks; Serial bus servo settings; Feedback mode setting; EoAT mode setting, etc. (Note: Please refer to the WIKI for more details) |






















{kind=link}
Komentari