s 3S Lithium batteries (NOT included)
Load capacity |
0.2kg@0.5m |
repositioning precision |
~ 5mm |
Servo rotation speed |
40rpm (no-load, no torque limit) |
Operating range |
BASE-360°, SHOULDER-180°, ELBOW-225°, HAND-135°/270° |
Drive type |
TTL Serial bus servo, direct-drive joint |
Servo numbers |
7 |
Joint angle sensor |
12-bit 360° magnetic encoder |
Servo torque |
30KG.CM @12V, 20KG·CM @ 12V (EoAT) |
Joint feedback information |
servo status, joint angle, rotation speed, joint load, servo voltage, servo current, servo temperature and servo working mode |
Main control |
ESP32-WROOM-32 |
Main control module features |
WiFi, BT, Dual Core, 240MHz |
Wireless control mode |
2.4G-WiFi, ESP-NOW |
Wired control mode |
USB, UART |
Manual operation mode |
WEB control interface |
Host operation mode |
UART / USB / WEB commands in JSON data format |
Host support |
USB connection devices such as Raspberry Pi, Jetson Orin Nano, and PC. |
EoAT function |
clamp function by default, can be changed as an additional degree of freedom |
LED power |
≤1.5W |
OLED screen size |
0.91inch |
Other functions |
2-ch 12V power supply switch, 9-DOF IMU |
Robotic arm weight |
RoArm-M3-S: 973.5±15g
RoArm-M3-Pro: 1020.8g±15g
(Not including the weight of the table edge fixing clamp) |
table edge fixing clamp weight |
290±10g |
Supported table edge thickness of the clamp |
72mm |
Demo |
3D Cartesian coordinate system control (inverse kinematics control); Dynamic external force adaptive control; Joint angle control; Operating information feedback; FLASH files system operation; Steps recording and replaying; ESP-NOW control; Leading-Following mode (Hand guiding control); LED control; 12V power supply ON/OFF control; WiFi function settings; Set startup tasks; Serial bus servo settings; Feedback mode setting, etc. (Note: Please refer to the WIKI for more details) |
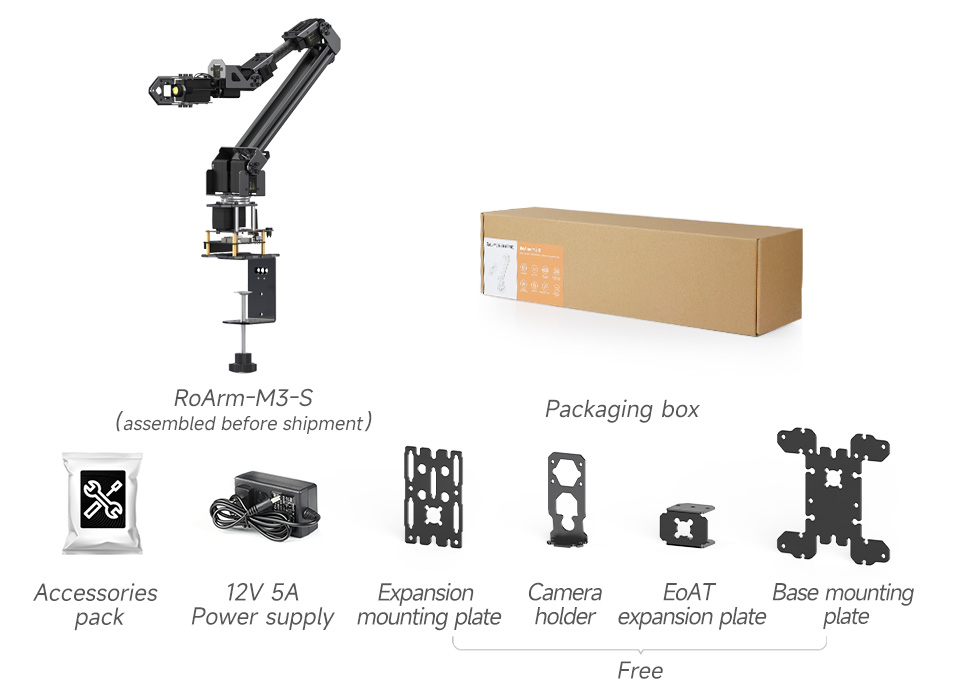
Product & Packaging show  Dimensions
Dimensions 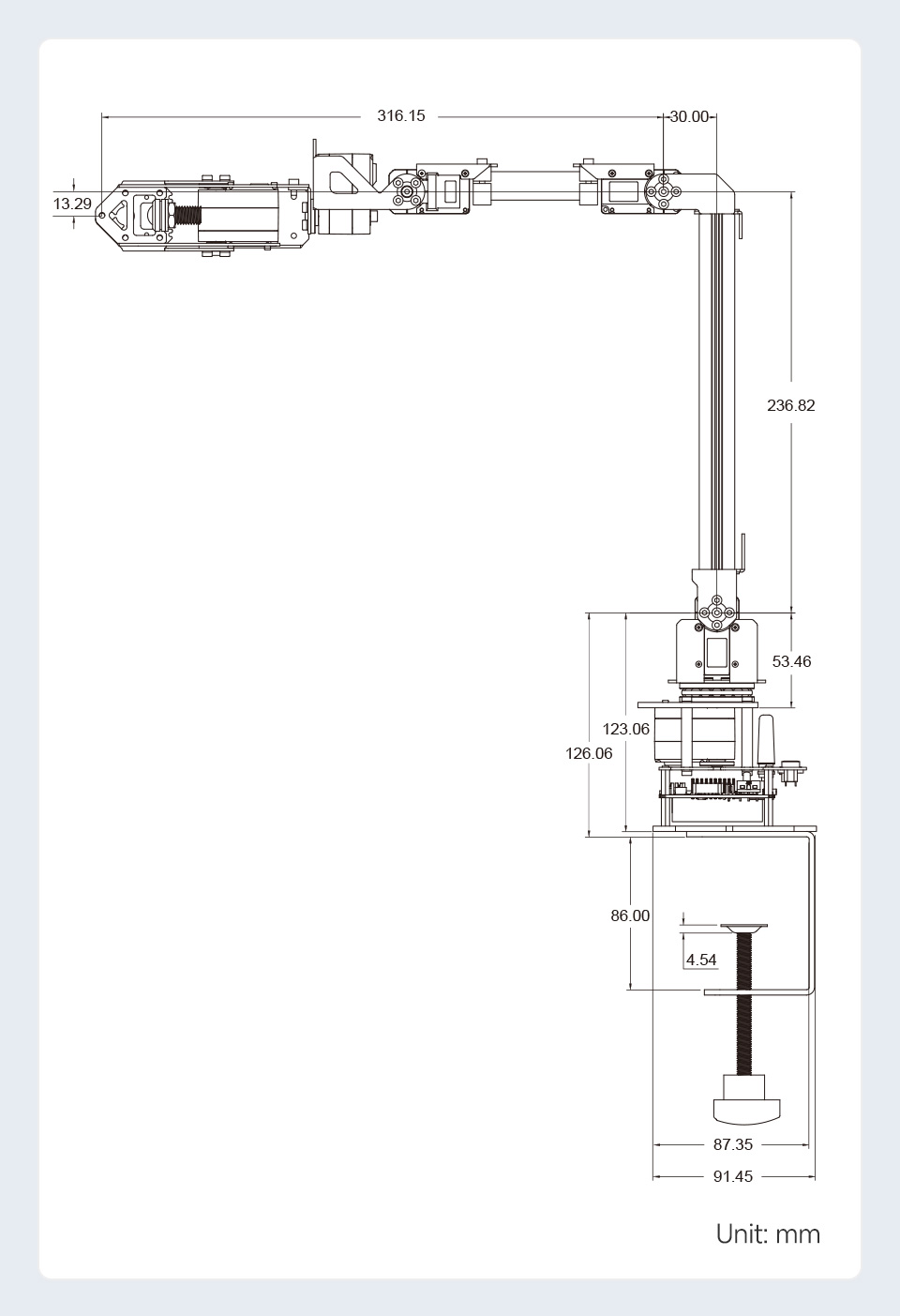 Package content: Weight:
Package content: Weight: 2.36 kg
RoArm-M3-S













{kind=link}
Komentari